问题背景
随着科技的发展,以及人民生活水平和人力成本的提高,扫地机器人已经在普通家庭中逐渐普及。扫地机器人是一种可对平整地面进行一定程度清扫的智能家用电器,其主要作用为清扫地面灰尘和垃圾。边刷(又称为起尘刷)作为扫地机器人的主要零件之一,其作用是将扫地机器人无法抵近的墙边与角落的灰尘清扫出来,以便吸尘系统将灰尘吸干净。

根据设计要求,边刷与地面的接触力大小需要控制在一定范围,同时为了获得较好的清扫效果,应尽可能增加边刷在清扫过程中与地面的接触长度。
边刷结构
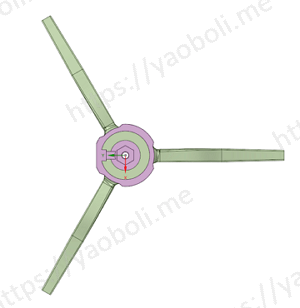
本文分析的边刷具有三个刷头,在圆周上均匀分布,刷头为软质材料,在与地面接触时会产生变形。
分析假设与建模说明
- 根据设计安装要求,边刷旋转轴线与地面不垂直,因此在边刷旋转过程中,刷头与地面的接触力呈周期变化,在靠机器外侧的力最大,回到机器内侧时逐渐减小到零;
- 经过分析可知,当其中一个刷头与地面接触并产生最大变形时,另外两个刷头只是与地面轻微接触,因此边刷与地面的接触力计算可只取其中一个刷头进行分析;
- 边刷沿墙和沿直线的转速分别为330rpm、150rpm,忽略惯性力影响,选择静力分析;
建模分析
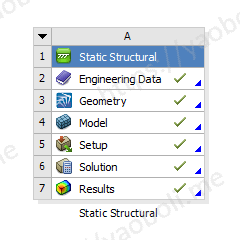
1)建立静力分析系统;
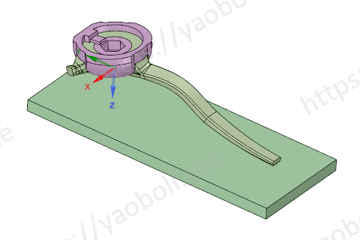
2)导入边刷几何模型,在SpaceClaim中进行简化处理,去除过小的圆角,保留一个刷头并切除两个,建立地面模型;
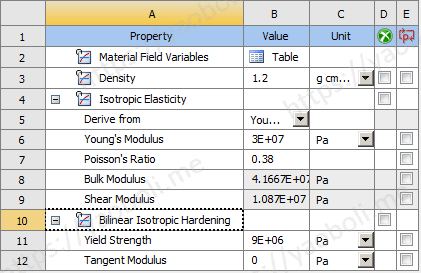
3)选择双线性理想弹塑性材料本构,定义边刷的材料参数如下图;
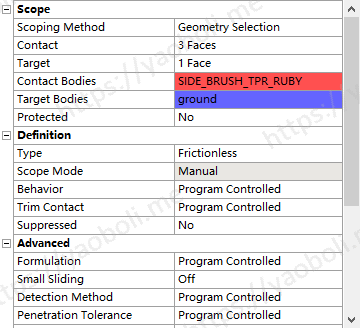
4)定义刷头与地面之间的无摩擦接触,并在刷头安装位置定义Remote Point;
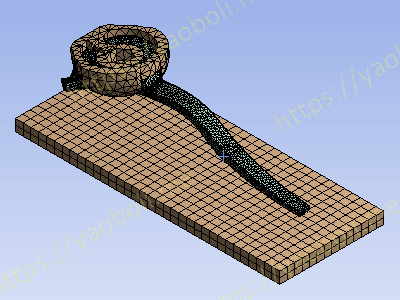
5)采用自由网格划分,对刷头和应力集中区域进行网格细化,总共生成27374个单元和49498个节点;
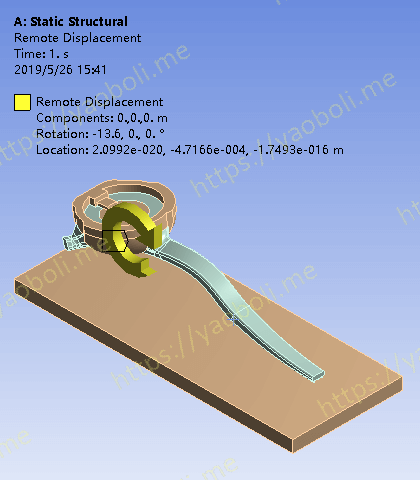
6)通过前面定义的Remote Point施加角度载荷,约束地面,执行静力分析;
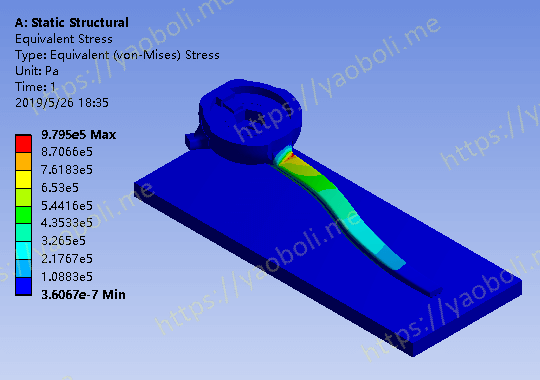
7)应力分析结果如下,可以看到刷头根部有明显的应力集中现象,但最大应力值仍远小于材料的屈服强度;
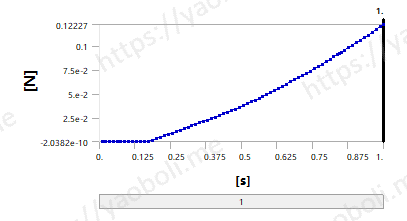
8)刷头与地面的接触变化曲线如下图,初始状态刷头与地面无接触,因此接触力为零,最大接触力0.122N(约12.5gf);
9)刷头与地面的接触动画如下
优化设计
原始设计的接触力与设计目标有一定差距,刷头与地面的接触长度也不够理想,需要进一步优化结构。
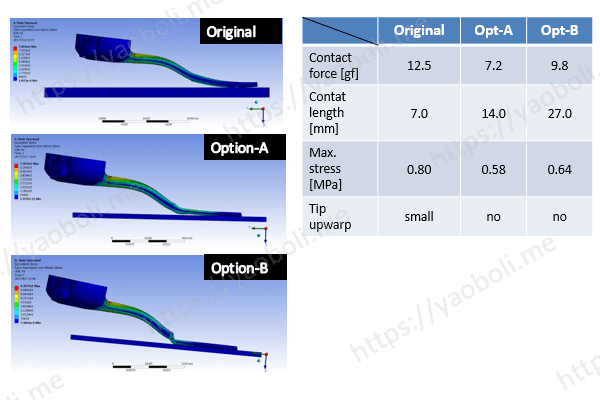
经过优化后的边刷实测结果如下图,刷头与地面在约180度范围内维持较大的接触长度,边刷总的清扫角度约270度。


